キーワード:人間機械共生系、ヒューマンファクター、人間中心の自動化、権限と責任、適応的機能配分
http://www.risk.tsukuba.ac.jp/~inagaki/coagency.html

私たちの身近には、「賢い機械」が多数存在しています。それらはシステムの安全性や人の負担軽減、そして快適性の向上に寄与してきました。一方で、人が機械へ過剰に信頼することよりさまざまなトラブルや事故が発生する場合もあります。本リサーチユニットでは、工学・心理学・法学の視点から高度技術システムと人との関わりを考察し、新学問領域「人間機械共生系」を構築しています。人と機械が共生するための課題を解決して国内外へ発信するとともに、成果の社会還元をめざして研究を進めています。
リスク環境下におけるヒトと機械の協調
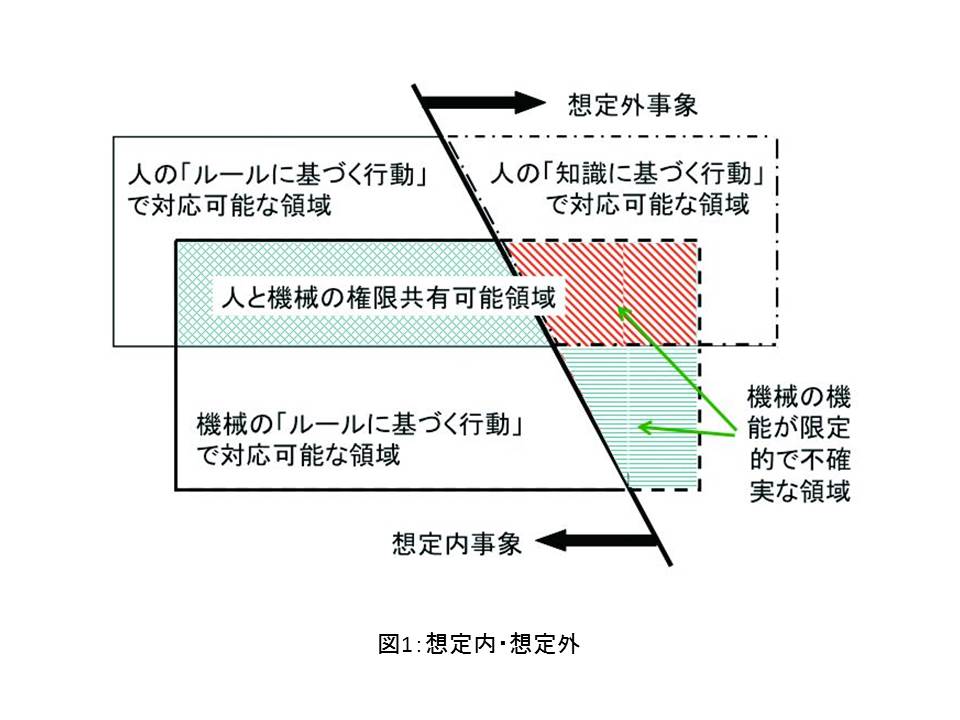
鉄道・自動車・航空機といった交通移動体では、人を支援するさまざまな技術が導入されています。しかし、設計で想定しなかった現象が起こると、機械の機能は保証されず、時間と情報が不足するなかで、人は全身全霊で対処するしかありません。懸命の努力にもかかわらず結果的に被害が生じてしまうと、法的責任を問われることもあります。こうした想定外のリスク環境下においては、人と機械の協調のあり方を見直し、新たな共生へと議論を進めることが必要です(図1)。そのために、交通移動体の安全確保が可能な、レジリエンス*1を備えた多層的安全制御システムの開発と、刑事過失責任に関わる新しい法理論の提案を目指しています。
ヒトと機械の共存には、頼りすぎないことも重要
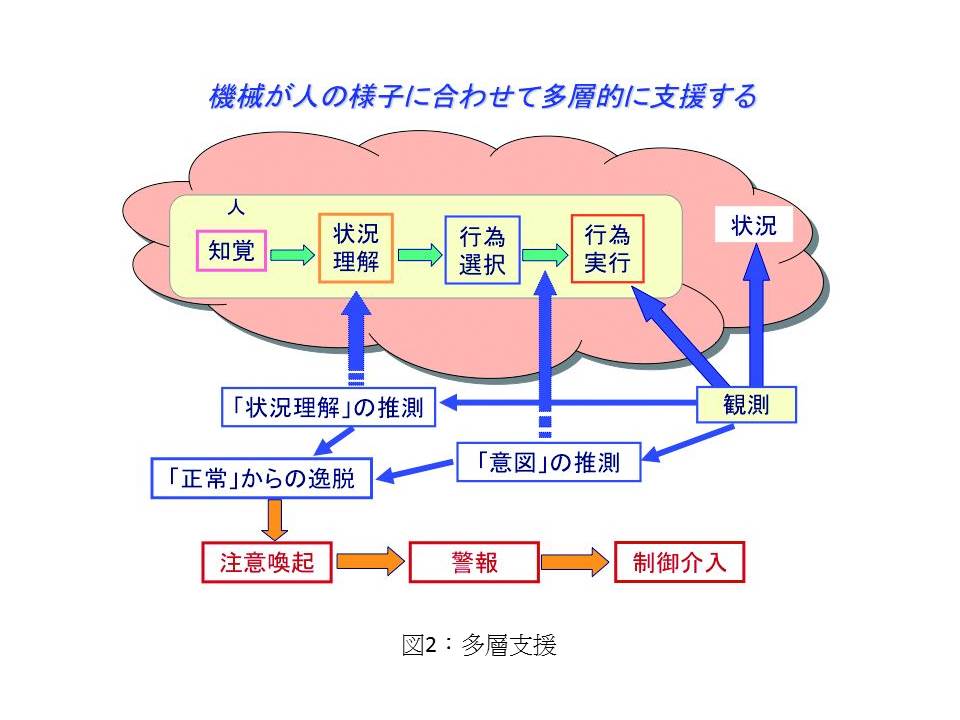
交通移動体では、標準操作手順として状況ごとになすべきことが定められています。鉄道の場合、安全を左右する重要な操作は、指令室からの指示や許可のもとに実行することになっていますが、実際には運転士の独自の判断で被害を免れたケースもあります。これは想定外事象の本質を見抜き、その場で危険回避のための手順を作り出すことができる、人の能力のすばらしさを物語っています。他方、機械が危険を察知した時には、危険回避のために自動でブレーキをかけることもありますが、機械任せになる問題も残っています(図2)。本リサーチユニットでは、人と機械がたがいの能力限界を補いながら、互いの長所をさらに伸ばしつつ協調するような、タフでしなやかなシステムをデザインするための方法論を構築しています(図3)。

社会への貢献・実績
● 国土交通省 自動車局「第5期先進安全自動車(ASV)推進検討会」副座長、「運転支援設計検討分科会」分科会長(2011-現在)
● 警察庁「安全運転支援システム(DSSS)有識者懇談会」委員(2009-2010)
● 国土交通省 自動車交通局「第4期先進安全自動車(ASV)推進検討会」座員(2006-2011)、「安全運転支援システム検討タスクフォース」リーダー(2009-2011)
● 日産自動車株式会社:「高機能運転支援システムにおけるヒューマンファクターに関する研究」「自動運転システムの動作におけるドライバに対する受容性に関する研究」
● 東日本旅客鉄道株式会社:「システム化の進展に応じた乗務員室の情報環境の研究」
(取材:平成25年9月26日)
Interface and Interaction to Promote Human-Machine Collaboration
Unit members : Kameda, Yoshinari Kitahara, Itaru Suzuki, Kenji
Key words:human-machine coagency, human factors, human-centered automation, authority and responsibility, and adaptive function allocation
There are many “smart machines” around us. These machines have increased the safety of systems, reduced burdens placed on people, and improved comfort. On the other hand, overtrust in machines may cause a variety of incidents and accidents. Our research unit discusses the relationship between advanced technological systems and people from the viewpoints of engineering, psychology, and the law to establish a new academic discipline, named “human-machine coagency.” Our research goal is to solve problems to help humans and machines compensate for each other, and provide people in Japan and other countries with research findings to contribute to society.
Human- machine collaborations in risk environment
Various transportation systems, such as trains, automobiles, and aircraft, have adopted a variety of technologies to support human operators. However, these systems are not guaranteed to function in the event of an unexpected situation which they are not designed for. In such a situation, problems will have to be addressed solely by human operators despite a lack of time and information. However, damage may be caused and humans in charge may have to assume liability for it, no matter how hard they try to solve the problems. In such an environment involving unexpected risks, it is necessary to review the relationship between humans and machines and discuss how people should live in harmony with them (Figure 1). To this end, we aim to develop a multilayered safety control system with resilience, which secures the safety of transportation systems, and propose a new legal theory in relation to criminal negligence liability.

Figure 1: Expected and unexpected events
Humans and machines may rely on each other, but not in an excessive manner
n the operation of transportation systems, standard operating procedures to be conducted in specific situations have been established. When the operators of trains conduct important procedures associated with safety, they must comply with instructions from the operation room and receive their permission. However, judgment made by the operator himself /herself sometimes prevents accidents. This is a good example of the excellent ability of humans to capture the essence of an unexpected event and improvise procedures to avoid risks. On the other hand, the human may become excessively dependent on the machine; as in the case in which a driver assistance system applies an automatic brake to prevent an accident every time when it detects risks (Figure 2). Our research unit develops methodologies to design robust and resilient systems that allow humans and machines to compensate for each other’s capacity limitations and cooperate to help each other enhance their strengths (Figure 3).

Figure 2 : Multitier support

Figure 3 : Driver Assistance
Social contributions and achievements
● A member of the “Expert Council for Driving Safety Support Systems (DSSS)” established by the National Police Agency (2009 to 2010)
● A member of the “Fourth Review Committee for the Promotion of Advanced Safety Vehicles (ASV)” (2006 to 2011) and the leader of the “Task Force for Safe Driving Support Systems” (2009 to 2011) established by the Road Transport Bureau of the Ministry of Land, Infrastructure, Transport and Tourism
● Nissan Motor Co., Ltd.: “Research on human factors in high-functional driving support systems”, “Research on driver’s acceptance of automated driving systems”
● Japan Railway East: “A study of advanced information environment for train operators”